在运筹优化、数学建模以及工业工程等领域中,IBM的CPLEX优化工具以其强大的求解能力和出色的工程落地性,成为企业与研究机构广泛采用的主流求解器之一。为了在面对现实问题时获得更快、更优的解,理解“CPLEX优化采用的什么算法”以及“CPLEX优化前后对比代码咋写”这两个问题,对于使用者深入掌握CPLEX优化流程、调参策略与模型调优具有重要意义。本文将围绕这两个焦点,系统拆解CPLEX的算法结构与代码实践细节,帮助读者快速提升建模与求解效率。
一、CPLEX优化采用的什么算法
CPLEX之所以能够处理大规模线性、混合整数和二次优化问题,核心就在于其内部嵌入了多种强大且高度优化的算法框架。根据模型的类型不同,CPLEX会自动选择或允许用户手动设定最优算法路径。
1. 单纯形法(Simplex)CPLEX支持两种主流单纯形算法:
Primal Simplex:从原始可行解出发进行迭代,适用于变量约束比较紧、容易找到初始可行解的模型。
Dual Simplex:从对偶问题出发求解,尤其适合频繁变化约束条件的优化模型(如分支定界过程中的子问题求解)。
Dual Simplex 是当前工业界最常用的默认方法,尤其在MIP建模阶段做松弛优化(LP relaxation)时表现极佳。
2. 内点法(Barrier Method)
Barrier(屏障法)是一种无单纯形的算法路线,通过数学上的对数障碍函数逼近最优解路径,适用于:
高维稠密矩阵;
变量数量极大,稀疏结构较少的问题;
二次规划(Quadratic Programming, QP)或凸优化问题。
内点法不能直接处理整数变量,但在LP或QP求解中提供了比单纯形更具稳定性的替代。
3. 分支定界法(Branch-and-Bound)
处理混合整数规划(MIP)模型时,CPLEX会默认启用分支定界策略。它将包含整数约束的问题通过不断划分决策空间,构建一个“搜索树”,每次在局部可解区域上进行优化判断。
其核心机制包括:
节点选择策略:例如最小下界优先、深度优先、伪成本策略;
变量分支选择:哪一个变量最适合当前节点分割;
剪枝机制:通过上界下界比较剪除无解或非优路径。
配合cutting plane技术,分支定界算法能更快速收敛到全局最优。
4. 启发式算法(Heuristics)
在大多数混合整数模型求解中,CPLEX会自动插入启发式算法,用于:
尽早找到一个可行解(Feasible Solution);
在未求出全局最优前先输出高质量近似解。
例如,Feasibility Pump、Local Branching、RINS(Relaxation Induced Neighborhood Search)等,都是CPLEX中默认启用的重要启发式组件。
5. 多线程并行优化(Parallel Optimization)
CPLEX 12.x及以上版本支持自动并行求解,适用于多核计算环境,分支节点、cut生成和LP求解过程可并行化运行,大幅提升大规模模型求解速度。
附加说明:用户可以通过设置
CPX_PARAM_LPMETHOD、CPX_PARAM_MIPSEARCH、CPX_PARAM_THREADS 等参数控制算法路径和并行程度。

二、CPLEX优化前后对比代码咋写
除了理解算法原理,在项目实践中更重要的是:如何通过合理编码,对比优化前后的建模逻辑、性能指标与代码结构。以下以Python接口(DOcplex)为例,演示优化建模及前后对比的完整流程。
1. 定义初始模型(优化前)
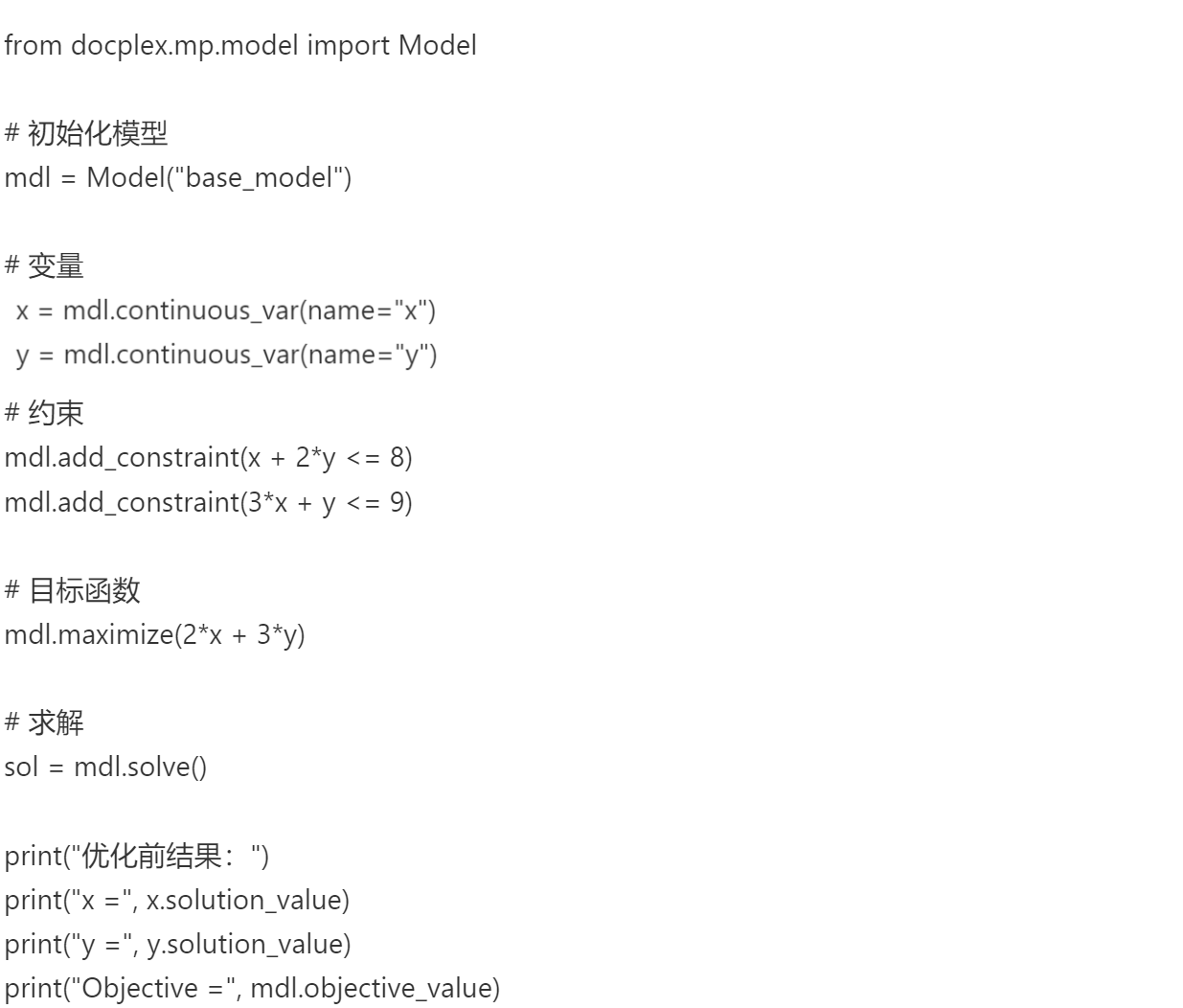
该模型构建了一个线性优化问题,求解非常简单。但在工业场景中,目标函数与约束条件可能更加复杂。
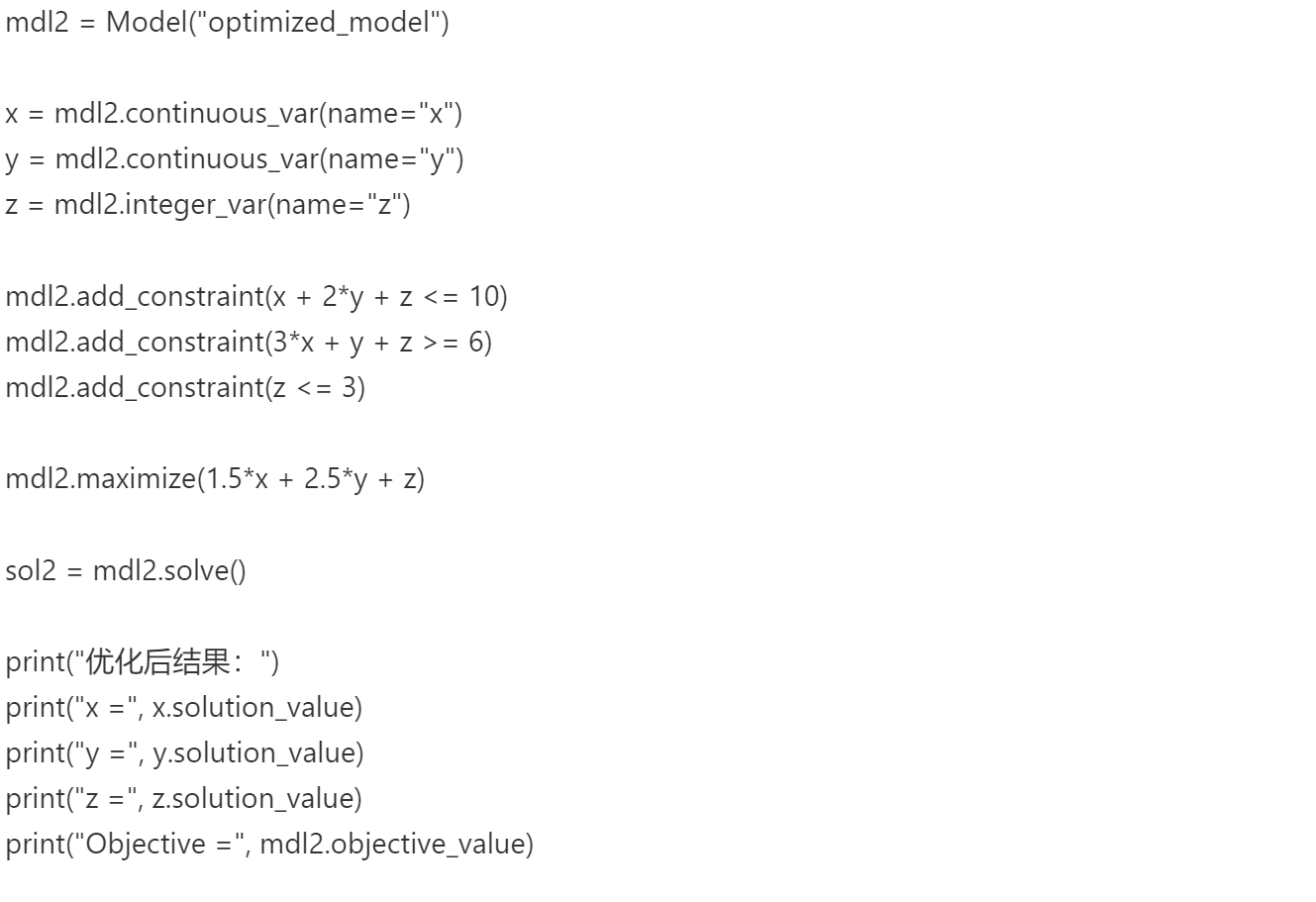
2. 模型改写与优化(优化后)
假设为了提升调度准确率与控制成本,我们做出以下改进:
新增资源约束;
加入整数变量z;
改写目标函数权重。
# 新模型(优化后)
3. 结果对比与调参建议
通过两次求解结果,我们可以对比以下几项:
求解时间(通过 mdl.solve(log_output=True) 输出)
目标函数值变化
变量取值结构变化
是否从连续优化转变为MIP求解
同时可调节以下参数进一步测试:
mdl.parameters.timelimit = 10 # 设置最大求解时间为10秒
mdl.parameters.threads = 4 # 设置4线程并行优化
mdl.parameters.mip.tolerances.mipgap = 0.01 # 设置1%的Gap容差
三、CPLEX如何求解多个最优解与次优解
在实际应用中,线性或混合整数规划问题往往不仅需要找到一个最优解,更需要对问题的解空间有更全面的了解,尤其是在设计备选方案、进行鲁棒性分析或制定灵活策略时,多个解的获取变得极为重要。CPLEX虽然默认只输出一个最优解,但它提供了多种机制,帮助用户发掘多个可行解、最优解或次优解。
1. 使用Solution Pool功能
CPLEX 的 Solution Pool 是专门为获取多个可行解而设计的机制,通过设置参数,用户可以:
指定希望保留多少个解(参数:PopulateLim)
控制解之间的差异度(参数:SolutionPoolGap, SolutionPoolIntensity)
选择是否仅保留最优解集合,还是允许次优解进入解池
例如在OPL中使用:

这段代码可让模型输出多个满足约束条件的解。
2. 设置目标值范围进行次优解搜索
通过设置目标函数的容忍区间,可以限制CPLEX在某一最优值附近继续寻找其他可行解。例如,允许结果目标函数在最优值基础上浮动1%:
cplex.setParam(IloCplex.Param.MIP.Tolerances.MIPGap, 0.01);
这种方法适用于在一个成本极小幅度损失的前提下,寻找其他“差不多好的”解。
3. 构建分支模型逐一枚举解
对于不适用解池机制的问题(例如线性规划),可以:
获取第一个最优解后,将该解设为禁止(添加排除约束)
重复求解,逐步获取次优解
示例限制方式:引入“不等式”禁止当前组合再次出现
这种方式适合构建可操作的“备选方案列表”,尤其在策略评估和AI调度中极具实用性。
4. 实际案例启示
在供应链优化中,多个解可对应于多种运输路径与库存策略;在制造优化中,不同排程组合可能具有接近的性能指标;在金融建模中,多组投资组合的风险收益值差异微小但应对环境不同。
通过CPLEX的多解探索机制,决策者可更全面了解方案选择空间,提升模型的可解释性和抗风险能力。
总结
CPLEX优化采用的什么算法 CPLEX优化前后对比代码咋写这两个问题是理解与运用CPLEX建模求解能力的核心基础。通过掌握CPLEX内部的单纯形、内点、分支定界、启发式与并行等算法体系,开发者可以更加有的放矢地选择合适的求解策略。而通过清晰的模型构建与代码对比,不仅能高效验证优化效果,还能逐步完善建模思路,实现工程级别的部署与优化。未来在数据驱动决策与智能优化场景中,CPLEX仍将是不可或缺的重要工具。
