在运筹学和数学优化领域,CPLEX二次规划(Quadratic Programming,QP)作为一类特殊的非线性优化问题,因其在金融投资组合、工程控制、供应链管理等场景中的广泛应用而备受关注。本文将从CPLEX二次规划的定义与特性、CPLEX求解二次规划的核心方法以及CPLEX二次规划参数调优技巧三个维度展开,全面解析如何通过IBMILOGCPLEX这一商业优化器高效解决复杂二次规划问题,并探讨提升求解效率的实践策略。
一、CPLEX二次规划是什么
CPLEX二次规划是目标函数为二次函数、约束条件为线性的一类数学优化问题,其标准形式可表示为:

其中,Q为对称矩阵,c为线性系数向量,A和b定义线性约束。与线性规划(LP)相比,二次规划因目标函数的非线性特性,在建模时能更精准地描述现实问题中的成本权衡与风险控制(如投资组合优化中的方差最小化)。
作为业界领先的数学优化工具,CPLEX通过内置的二次规划求解器,支持凸二次规划(当Q矩阵半正定时)与非凸二次规划(Q矩阵不定)两类问题的求解。其核心优势在于:
1.高效算法融合:结合内点法(Interior-Point Method)和单纯形法的混合策略,尤其擅长处理大规模稀疏矩阵;
2.精确数值计算:采用双精度浮点运算与自适应数值稳定性控制,避免因舍入误差导致的求解失败;
3.多语言接口支持:通过Python、Java、C++等API或OPL建模语言无缝集成到企业级系统。
以金融领域为例,CPLEX二次规划常用于马科维茨投资组合模型,通过最小化资产收益方差(二次项)与最大化期望收益(线性项)的权衡,实现风险可控的最优资产配置。
二、CPLEX求解二次规划
CPLEX求解二次规划的过程可分为四个阶段:模型构建、算法选择、参数调优和结果解析。以下以PythonAPI为例说明关键步骤:
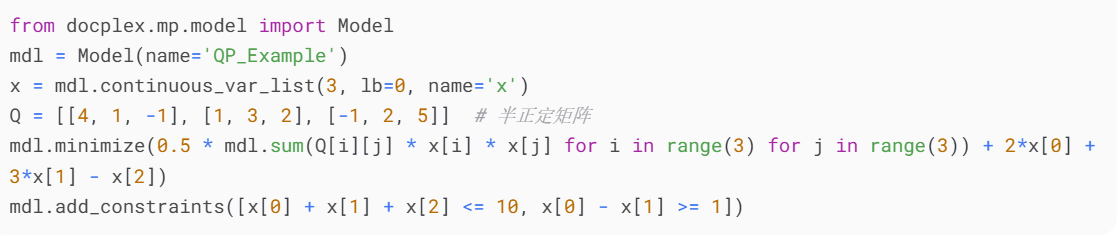
1.模型构建
使用`doCPLEX.mp.model`模块定义变量、目标函数及约束:
2.算法选择
CPLEX针对二次规划提供两种主要算法:
内点法:适用于大规模凸问题,默认采用路径跟踪法(BarrierAlgorithm),时间复杂度为O(n^3);
分支定界法:用于非凸问题,结合凸松弛与割平面技术确保全局最优性。
用户可通过`parameters.optimality target`参数指定求解目标(如`optimalitytarget=3`强制全局最优)。
3.性能调优
关键参数包括:
`optimalitytol`:控制最优性容忍度(默认1e-6),收紧可提升精度但增加计算时间;
`threads`:设置并行线程数以加速求解;
`solutiontype`:选择基解(Basic)或不可行解修复策略。
4.结果解析
通过`solution.get_values(x)`获取变量值,结合`solve_details`中的迭代次数、对偶间隙等指标评估求解质量。
三、CPLEX二次规划参数调优技巧
针对复杂二次规划问题,参数调优是提升CPLEX求解效率的关键。以下延伸关键词“CPLEX二次规划参数调优”并提供实践建议:
1.预处理策略
启用`preprocessing.presolve`参数(默认1)可自动消除冗余约束、固定变量并简化模型规模。对于含对称结构的二次项,手动分解Q矩阵为三角形式可减少非零元素数量。
2.算法混合配置
通过设置`algorithm`参数为4(混合屏障-单纯形法),在屏障法完成初始求解后,采用交叉法(Crossover)生成基解,兼顾速度与解的稀疏性。
3.非凸问题处理,随着量子计算与分布式优化技术的融合,CPLEX在超大规模二次规划中的应用潜力将进一步释放。
当Q矩阵不定时,需显式设置`optimalitytarget=3`以启用全局优化模式。同时,调整`mip.tolerances.mipgap`(如设为0.01)可平衡求解时间与解的质量。
案例演示:某物流配送中心需优化运输路径成本(含距离平方项),通过以下调优使求解时间缩短40%:
CPLEX二次规划凭借其强大的算法库与灵活的接口设计,成为解决复杂二次优化问题的首选工具。通过深入理解模型结构、合理配置求解参数,用户能够在金融、制造、能源等领域实现高效决策支持。
